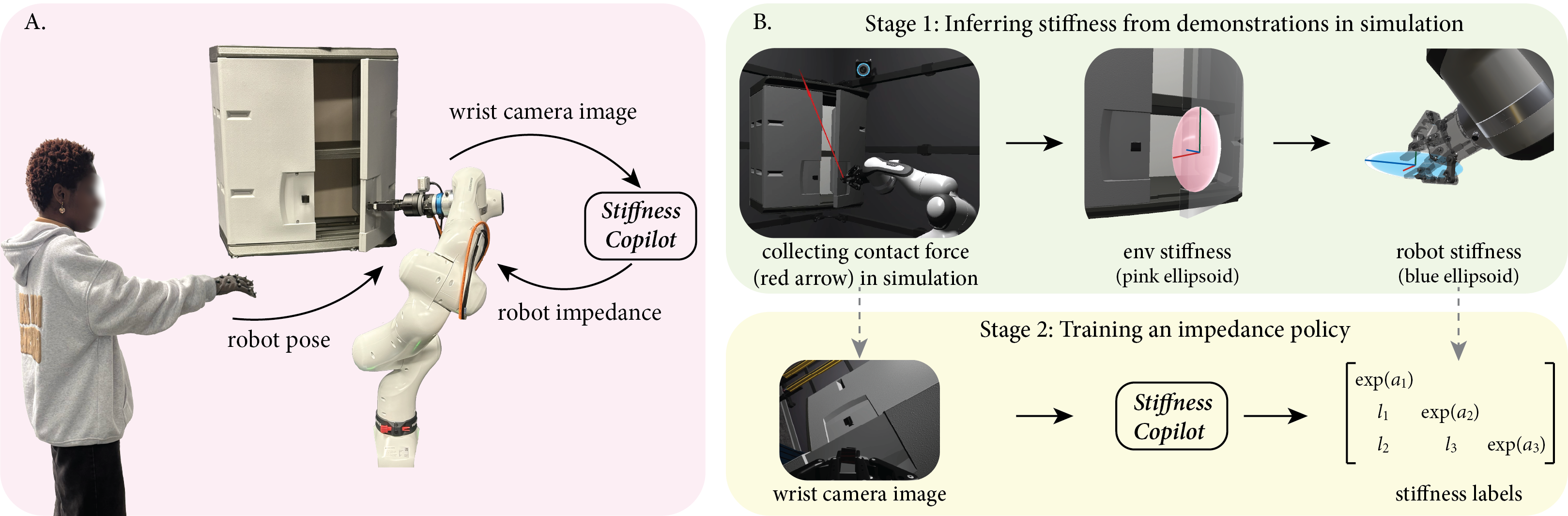
Stiffness Copilot: An Impedance Policy for Contact-Rich Teleoperation






1Meta Reality Labs Research
2University of Wisconsin–Madison
3Purdue University
This work was conducted during internships at Meta Reality Labs Research.